Sparki will move based on the button pushed at the remote controller. There are four processes; push button on the remote controller, send signal, receive signal, take an action. When button is pushed, remote controller sends a signal; each button has its own signal. Then, Saprki receives a signal. This signal is decoded as a number at the Sparki when it receives it. Lastly, this number will be checked by programmed Sparki and action will be determined.
File Download and Detail:
- Lab Instruction
- Quiz
- Sample Code
- Remapping_remote
#include <Sparki.h> // include the robot library
void setup() {
sparki.servo(SERVO_CENTER); // center the servo
}
int program = true;
void loop() {
//Scan for IR Receiver
int code = sparki.readIR();
// if there is a valid remote button press
if(code != -1){
sparki.moveStop(); // stop the motor
sparki.RGB(RGB_OFF); // clear the RGB
program = false; // turn off the starter program
}
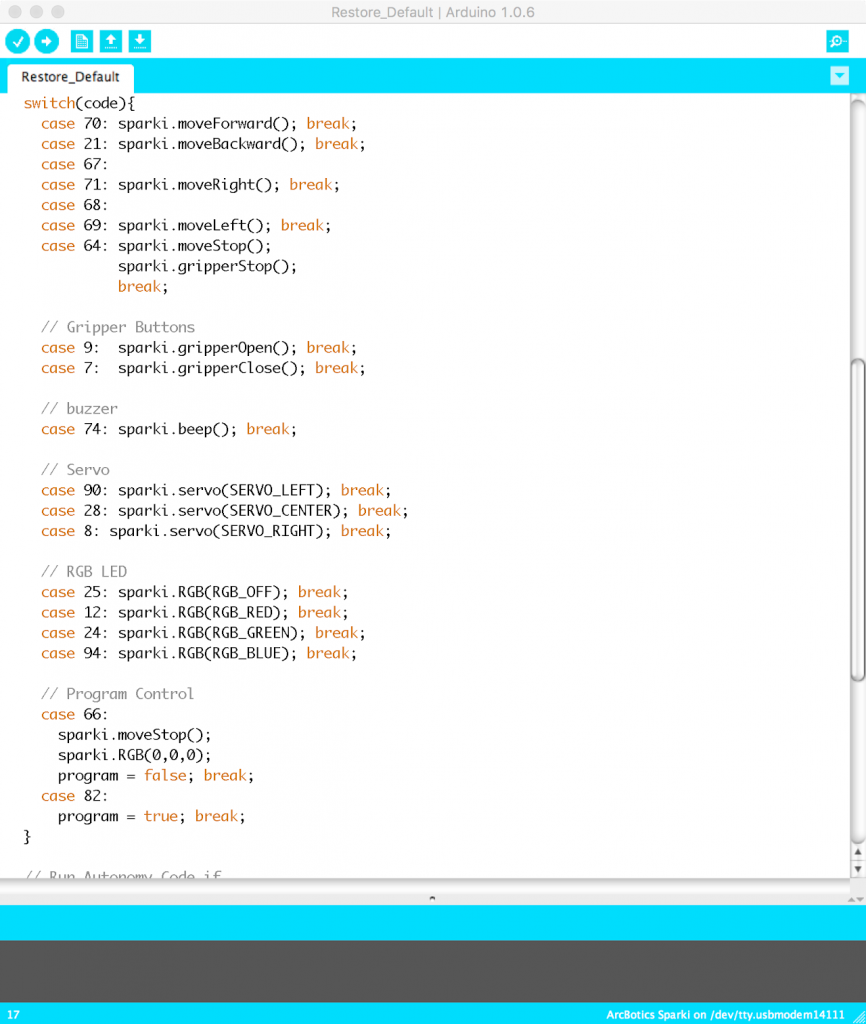
switch(code){
// Add + and - for forward and backward movement
case 13: sparki.moveFoward(); break; // + for forward
case 22: sparki.moveBackward(); break; // - for backward
case 70: sparki.moveForward(); break;
case 21: sparki.moveBackward(); break;
case 67:
case 71: sparki.moveRight(); break;
case 68:
case 69: sparki.moveLeft(); break;
case 64: sparki.moveStop();
sparki.gripperStop();
break;
// Gripper Buttons
case 9: sparki.gripperOpen(); break;
case 7: sparki.gripperClose(); break;
// buzzer
case 74: sparki.beep(); break;
// Servo
case 90: sparki.servo(SERVO_LEFT); break;
case 28: sparki.servo(SERVO_CENTER); break;
case 8: sparki.servo(SERVO_RIGHT); break;
// RGB LED
case 25: sparki.RGB(RGB_OFF); break;
case 12: sparki.RGB(RGB_RED); break;
case 24: sparki.RGB(RGB_GREEN); break;
case 94: sparki.RGB(RGB_BLUE); break;
// Program Control
case 66:
sparki.moveStop();
sparki.RGB(0,0,0);
program = false; break;
case 82:
program = true; break;
}
// Run Autonomy Code if
if(program == true){
sparki.RGB(RGB_GREEN); // turn the light green
sparki.moveForward(); // move Sparki forward
int cm = sparki.ping(); // measures the distance with Sparki's eyes
if(cm != -1) // make sure its not too close or too far
{
if(cm < 20) // if the distance measured is less than 10 centimeters
{
sparki.RGB(RGB_RED); // turn the light red
sparki.beep(); // beep!
sparki.moveBackward(10); // back up 10 centimeters
sparki.moveRight(30); // rotate right 30 degrees
}
}
delay(100); // wait 0.1 seconds (100 milliseconds)
}
}